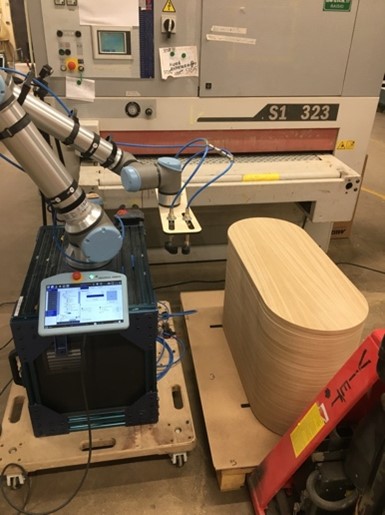
TSENTRI koostööroboti Roberta katsetustest Wermo tootmises annab ülevaate Erkki Naaris. Katsed tehti enne viimistlusliini oleva lihvpingi ja läbiva tööga puurpingi Biesse juures.
Kas mõistlikum oleks teemindada lihvpinki või puurpinki või mõlemat korraga – sellele saab vastuse järgnevast kokkuvõttest.
Roboti katsetamine Wermos
Tootmise ülevaatamise käigus leidsime päris mitu võimalikku kohta, kus võiks robotit katsetada.
Viimistlusliini teenindamine, lihvpingi teenindamine, erinevate puurpinkide teenindamine. Arutasime ka roboti kasutamist CNC juures, kuid kasutada olev robot UR10e jääks oma ulatuselt lühikeseks ja vajaks lisatelge ning lisaks pole katsetamisel väga lihtne CNC ja roboti vahelist kommunikatsiooni tekitada. CNC peab roboti poolt antud signaali alusel aru saama, millal on detail masinas ja robot peaks aru saama, millal töötlus on lõpetatud.
Valisime katsetusteks välja kaks kohta: lihvpingi enne viimistlusliini ja läbiva tööga puurpingi Biesse.
Roboti valmidus
Koostöörobot UR10e le on lisaks paigaldatud suruõhust vaakumit tootev generaator (SCHMALZ SBPL 100 HV), vaakumnupud (FESTO OGVM-30X65-AV-) ja vedruleevendi (SCHMALZ FSTE G1/4-AG 25). Vaakumnuppude hoidmiseks ja asukoha reguleerimiseks valmistasime eraldi rakise.
Lihvimine
Lihvpingi teenindamisel saab robotit kasutada nii detailide sisestamisel seadmesse kui ka detailide vastuvõtmisel seadmest.
Roboti kasutamisel detailide sisestamisel on võimalik saavutada ühtlane töötempo ja läbi optimaalse detailide asetusskeemi maksimaalselt ära kasutada lihvpingi kasulik pind,
Vastuvõtmisel on inimese sisestatud detailid kõigepealt roboti jaoks positsioneerida, mis muudaks kogu protsessi aeglasemaks.
Tulenevalt eelnevast tegime otsuse kasutada robotit detailide sisestamisel masinaase.
Esimene kogemus – detailide sisestamisel masin seiskus
Detailide sisestamisel tekkis esmalt olukord, kus detailide sisestamisel seadmesse masin seiskus, sest detaili serv läks roboti poolt detaili masinasse sisestades vastu masina turvapiiret. Põhjuseks on lihvpingi omapära, et seadme sissesöödu laud on liiga lühike – detaili ei saa sinna lihtsalt asetada, vaid tuleb positsioneerida nii, et robot topib detaili otsapidi masinasse juba peaaegu etteveo rulli alla. See nõuab väga täpset roboti ja detaili positsioneerimist.
Etteveo rulli alla paigaldades tekib olukord, kus mõningatel juhtudel ettevedu juba fikseerib detaili liiga kindlalt ja tekitab läbi selle jõu, mis mõjutab robotit üle tema turvalisuse piiri ning robot seiskub.
Selle probleemi lahendamiseks tuli roboti sujuv liikumine muuta sirgjoonelisteks lõikudeks ja lihvitavate detailide positsioon tuli panna väga täpseks.
Lahendus
Eelneva probleemi paremaks lahendamiseks peaks lihvpingi ees olema etteveoga sissesöödu-laud. Sinna peale saaks robot detaili paigaldada ohutumalt ja sujuvama liikumisega. See tõstab ka kokkuvõttes roboti töökiirust. Lisaks sellele ei jää pikemate detailide korral detail üle laua serva „rippuma“ Lisa-töölaud lihvingi ees aitaks ka inimesel detaile sisestades mugavamat ja kiiremini oma tööd teha.
Teine kogemus – robotil jäi jõudu väheseks
Suuremate detailide korral ei jõudnud robot seda pakist lahti tõsta. Siledate detailide vahele ei jää õhku ja seetõttu hoiab vaakumi mõjul tekkiv adhesioon neid nii kõvasti kinni, et roboti jaoks tekib ülekaal ja robot seiskub.
Lahendus
Selle katse korral sai lahendada olukorra nii, et liigutasime detaili külgsuunas paki pealt ära ja siis tekkis robotil võimekus detaili tõsta. Puuduseks jäi olukord, kus liikuma hakkas korraga mitu detaili, kui järgnevas kihis ei olnud see adhesioonjõud nii tugev. Lisaks muudab see lisaliigutus protsessi aeglasemaks. Mis parem lahendus oleks? Üks võimalustest võiks olla detailide alus panna kaldu. Sel juhul ei aeglustaks külgsuunal liikumine protsessi ja suurema tõenäosusega ei liiguks korraga kaks detaili. Samas jätab külgsuunas liikumine detaili kriimustamise võimaluse.
Parima lahenduse leidmiseks siin peaks veel erinevaid võimalusi katsetama.
Märkus kõrvalseisjalt
Liiga aeglane! Alati tundub ju, et tööd tehakse liiga aeglaselt. Võrdleme siis pisut.
Analoogse suurusega detaile tegi inimene 20 tk kahe minuti jooksul.
Robot tõstis sama suuri detaile 12 tk kahe minuti jooksul.
Roboti kulu tunnis on ca 3,2-3,5€.
Lihvpingi juures kasutamise korral asendaks ta täielikult abitöölise, sest kuna pingijuht saaks iseseisvalt teenindada lihvmasinat, robotit ja võtta vastu detaile. Roboti eeliseks on detailide asetamine kogu lihvlindi laiuse ulatuses, mida töötaja paigaldatud detailide korral siiski ei ole võimalik tagada. Kuigi inimene on oma liigutustega koostöörobotist kiirem, on roboti töö kindlasti ühtlasema tempoga – robotil pole vaja ennast vahepeal sügada ja suitsupausile minna. 😊
Kuidas robot kiiremaks saada?
- Lihvpingi ette tuleb paigaldada etteveoga sissesöödu laud. Kaovad ära täpsed sirgjoonelised liikumised ja roboti liikumine saab sujuvamaks ja kiiremaks.
- Robot paigaldada töölaua keskele selle kohale, et ta ulatuks paigutama detaile kogu töölaua ulatuses.
- Lihvitavate detailide aluse peab asetsema töölaua keskel, see peab olema kõrguses võimalikult ühel ja samal tasapinnal, et roboti liigutused oleks võimalikult lühikesed.
- Kui lisada siia stabiilne ilme pausideta töö, siis läbi selle võib roboti näiline aeglus vahetuse lõikes osutuda isegi efektiivsemaks.
Põhjused, mis räägivad roboti vastu
Detailid on liiga rasked või gabariitide poolest liiga suured. Roboti saab paigaldada nii et võimalusel saab detaile seadmesse sisestada ka inimene ise. Kogu tootmise voost peaks arvestama, kui suure osa moodustavad detailid mille tõstmisega robot hakkama ei saa. Kui nende osakaal on vähemuses on roboti kasutamine teoreetiliselt mõistlik kui aga vastupidi siis mitte.
Aeg-ajalt ladusatakse detailid pööratuna. Ehk siis lihvitav pind ei ole pealmine pool. Sellisel juhul jääb robot hätta ja peamiselt seetõttu et detailide ümber pööramine oleks küll võimalik aga muudab kogu tööprotsessi liiga aeglaseks. Tuleks kaaluda, kas on võimalik eelnevates protsessides midagi muuta, et detailid oleks tööpinki tulles juba õigesti alusel.
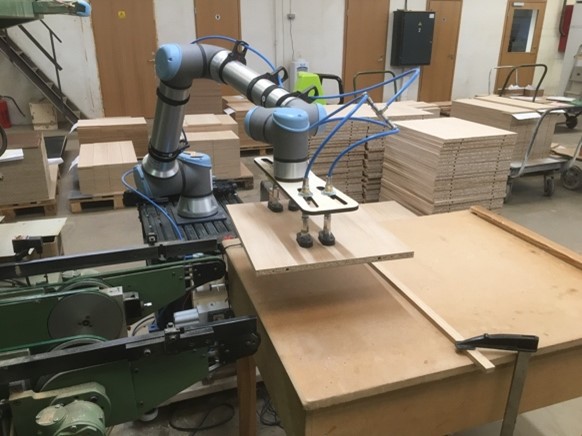
Puurimine
Katsetusteks valisime läbiva töötsükliga puurpingi Biesse. Siin samuti kaks võimalust robotiga pingi teenindamiseks: sisestamine ja vastuvõtt. Sisestamise juures on põhiline küsimus roboti ja detailide täpne positsioneerimine. Lisaks peavad detailid alusel olema väga täpselt paigaldatud.
Testi tegime detailide vastuvõtu poolel. Esiteks segab roboti paigutamine seadme vastuvõtu poolele vähem pingi häälestamist. Teiseks pidi testimise käigus ettevõtte töö jätkuma ning robot pidi vahepeal lihtsasti ära liigutatav olema.
Detailid väljusid seadmest mööda konveierit töölauale. Nende fikseerimiseks sai töölauale paigutatud piiraja. Detaili saabumise töölauale registreeris andur ja andis robotile signaali tegutsemiseks hetkel, kui detail sai oma kohale.
Esimene kogemus – detailide positsioon läks paigast
Detailide väljumise hoog seadmest oli niipalju suur, et detailid põrkasid piirajast tagasi ja seeläbi polnud nende positsioon enam täpne. Testitavate detailide puhul ei olnud see kriitiline, aga alusele paigutades ei jäänud detailid korrektsesse virna. Kui detaile on rohkem ja need tuleb ladustada ühel alusel mitmesse virna, siis võib tekkida oht, et virnad ei mahu alusele korralikult ära.
Lahendus
Töölaua pind peaks olema mitte nii hästi libisev või detailide fikseerimiseks kasutatav piiraja ei tohiks võimaldada detailide tagasi põrkamist.
Teine kogemus – detailivirnad segasid paigaldamist
Detailide kogused on väikesed ja alusele ladustatakse mitu erinevat detaili. Roboti kiirema töö tagamiseks peaks detailida alus hoidma anduri järgi stabiilset kõrgust. Kui robotile õpetada kõige optimaalsem asukoht, siis alusele mitme erineva positsiooni ladustamine võib osutuda keeruliseks.
Kõrguse hoidmise andur ei ulatu lugema õiget positsiooni. Erinevate detailide virnad segavad detailide paigaldamist.
Lahendus
Kui ühel alusel on mitu positsiooni, siis on lihtsam alus paigaldada uuesti vastavalt vajadusele robotile õpetatud optimaalse positsiooni kohale.
Aluse kõrguse reguleerimise andur peaks olema eraldi statiivil, mis laseks selle lihtsalt positsioneerida vastavalt hetkel ladustatavale detailide virnale.
Kolmas kogemus – robot jäi aeglaseks
Robot jäi mõningate detailide puhul aeglaseks. Kui detailide puurimistsükkel oli väga lühike (alla 8-10 sek), siis robot ei jõudnud detaile eest ära võtta. Selle tööpingi puhul lahenes asi nii, et operaator sisestas detaile pisut suurema vahega. Samas pole see tootlikkuse seisukohalt parim lahendus.
Lahendus
Kiiresti läbivad detailid on reeglina väikesed ja neid saaks tõsta kahekaupa. Selleks tuleb
vaakumnuppude hoidmise rakis projekteerida selliselt, et vaakumnuppe saaks reguleerida kahes erinevas suunas. Detaili tuvastamise andur tuleks fikseerida selliselt, et reageeriks siis, kui mõlemad detailid on omal kohal.
Kokkuvõtteks
Lihvpingi teenindamine. Vajalik oleks mõningate töökorralduslike muudatuste tegemine. Lisaks on vajalik lisa-töölaua paigaldamine. Kui suure osa detailidest saaks robot teenindada, tuleb tuvastada detailivoo järgi. Kui see osutub valdavalt mitte-robotisõbralikuks, siis pigem ei soovitaks. Kui enamus detaile on võimalik robotiga teenindada, siis ülejäänute jaoks saab kasutada ajutist abitööjõudu.
Puurpingi teenindamine. Tagasiside puuri operaatorilt: „Saab hakkama küll!“. Vajalik on mõningane vastuvõtulaua ümberehitus ja töökorralduslikult tuleb mõelda lahendus detailide paigaldamisele alusele. Puuduseks on see, et puurpink ei ole piisavalt palju koormatud, et robotil oleks pidevalt tööd. On ka mingi hulk detaile, mida robot ei suuda vastu võtta. Samas ei sega roboti paigutus ajutise tööjõu kasutamist roboti asemel.
Kuna robot ei ole kummagi pingi puhul koormatud 100%- liselt, siis võiks hea planeerimise korral 1 robot teenindada mõlemat – nii lihvpinki kui ka puurpinki.